
Publicado: 18/07/2022 17:00
Actualizado: 18/07/2022 17:09
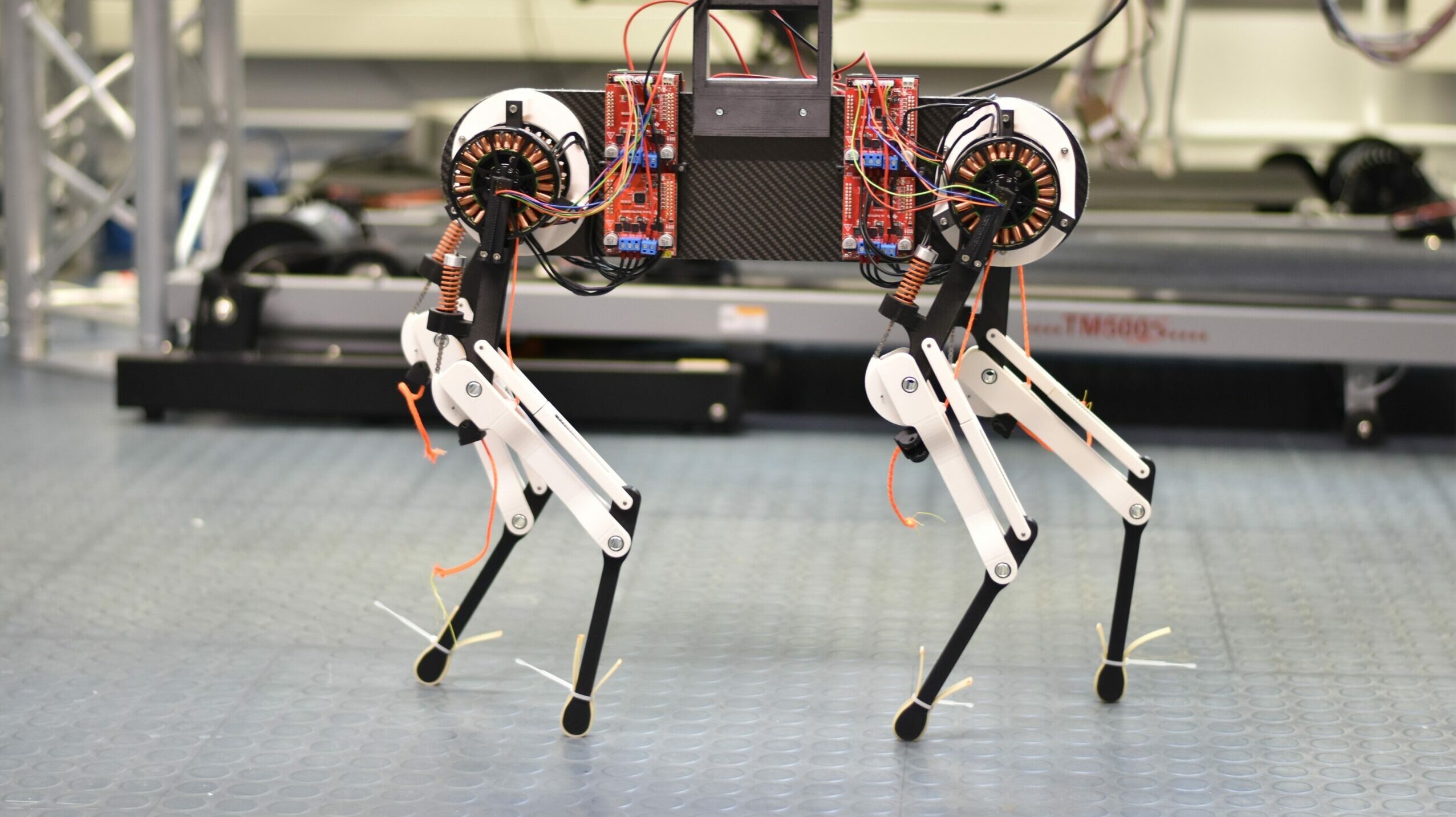
Un robot puede ayudarnos a entender mejor el movimiento de los animales. Investigadores del Instituto Max Planck para Sistemas Inteligentes (MPI-IS) en Stuttgart han construido un robot de cuatro patas del tamaño de un perro y al que han llamado “Morti”, que les ha ayudado a descubrir los detalles de cómo los animales aprenden a caminar y aprender de los tropiezos.
"Como ingenieros y especialistas en robótica, buscamos la respuesta construyendo un robot que presenta reflejos como un animal y aprende de los errores", dice Felix Ruppert, que lidera el trabajo publicado este lunes en la revista Nature Machine Intelligence. "Si un animal tropieza, ¿es un error? No si sucede una vez. Pero si tropieza con frecuencia, nos da una medida de qué tan bien camina el robot".
Una médula espinal virtual
Una jirafa o un potro recién nacido debe aprender a caminar sobre sus patas lo más rápido posible para evitar a los depredadores. Los animales nacen con redes de coordinación muscular ubicadas en la médula espinal. Sin embargo, aprender la coordinación precisa de los músculos y tendones de las piernas lleva algún tiempo. Inicialmente, los animales bebés dependen en gran medida de los reflejos de la médula espinal. Aunque algo más básicos, los reflejos de control motor ayudan al animal a evitar caerse y lastimarse durante sus primeros intentos de caminar.
Esta médula espinal virtual se coloca en la espalda del robot cuadrúpedo donde estaría la cabeza
Es por eso que el equipo de Ruppert ha querido imitar a la naturaleza afarolando una “médula espinal virtual” que se optimiza continuamente. El resultado es que, después de aprender a caminar en solo una hora, el robot de Ruppert hace un buen uso de la compleja mecánica de sus piernas. Un algoritmo de optimización bayesiano guía el aprendizaje: la información medida del sensor del pie se compara con los datos objetivo de la médula espinal virtual modelada que se ejecuta como un programa en la computadora del robot.
El robot aprende a caminar comparando continuamente la información del sensor enviada y esperada, ejecutando bucles reflejos y adaptando sus patrones de control motor.
El robot que aprende a andar en una hora
El algoritmo de aprendizaje adapta los parámetros de control de un Generador Central de Patrones (CPG). En humanos y animales, estos generadores de patrones centrales son redes de neuronas en la médula espinal que producen contracciones musculares periódicas sin la intervención del cerebro. Las redes generadoras de patrones centrales ayudan a generar tareas rítmicas como caminar, parpadear o hacer la digestión.
Además, los reflejos son acciones de control motor involuntario desencadenadas por vías neuronales codificadas que conectan sensores en la pierna con la médula espinal.
Siempre que el animal joven camine sobre una superficie perfectamente plana, las CPG pueden ser suficientes para controlar las señales de movimiento de la médula espinal. Un pequeño bache en el suelo, sin embargo, cambia el andar. Los reflejos se activan y ajustan los patrones de movimiento para evitar que el animal se caiga. Estos cambios momentáneos en las señales de movimiento son reversibles o 'elásticos', y los patrones de movimiento vuelven a su configuración original después de la perturbación.
Pero si el animal no deja de tropezar en muchos ciclos de movimiento, a pesar de los reflejos activos, entonces los patrones de movimiento deben volver a aprenderse y hacerse 'plásticos', es decir, irreversibles. En el animal recién nacido, las GPC inicialmente aún no están lo suficientemente ajustadas y el animal tropieza, tanto en terrenos llanos como irregulares.
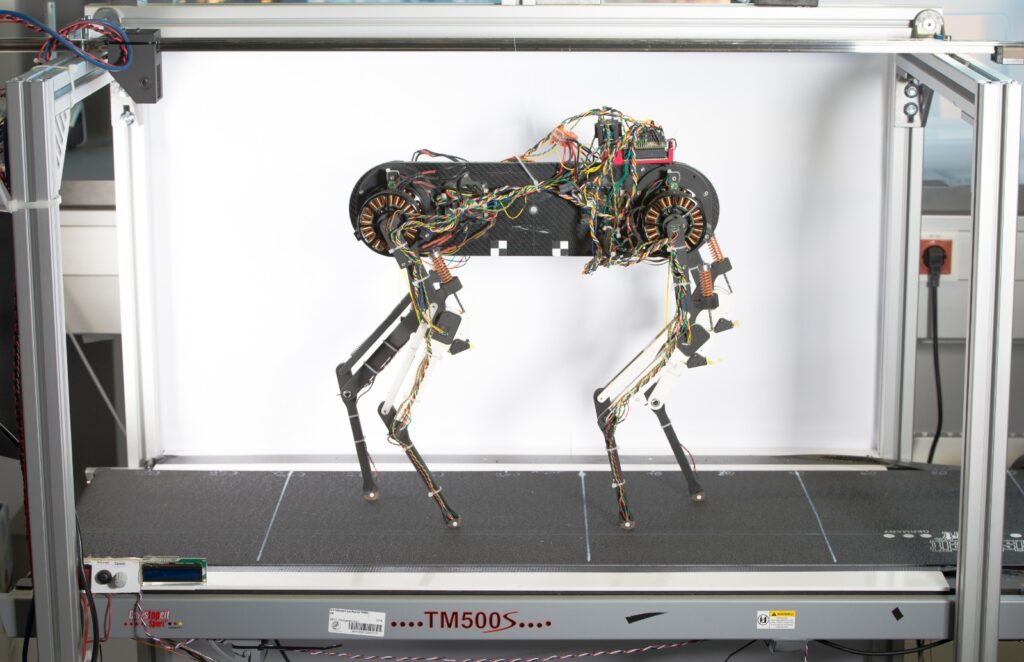
Lo mismo ocurre con el perro-robot "Morti". Aún más, el robot optimiza sus patrones de movimiento más rápido que un animal, en aproximadamente una hora. El CPG de Morti se simula en una computadora pequeña y liviana que controla el movimiento de las piernas del robot. Esta médula espinal virtual se coloca en la espalda del robot cuadrúpedo donde estaría la cabeza.
Durante la hora que tarda el robot en caminar sin problemas, los datos de los sensores de los pies del robot se comparan continuamente con la toma de contacto prevista por el CPG del robot. Si el robot tropieza, el algoritmo de aprendizaje cambia la distancia a la que se balancean las piernas hacia adelante y hacia atrás, la velocidad a la que se balancean las piernas y cuánto tiempo está una pierna en el suelo.
Si el robot tropieza, el algoritmo de aprendizaje cambia la distancia y velocidad a la que se balancean las piernas
El movimiento ajustado también afecta cómo de bien puede utilizar el robot su mecánica de piernas compatible. Durante el proceso de aprendizaje, el CPG envía señales motorizadas adaptadas para que el robot en adelante tropiece menos y optimice su marcha. En este marco, la médula espinal virtual no tiene conocimiento explícito sobre el diseño de las piernas del robot, sus motores y resortes. Sin saber nada sobre la física de la máquina, carece de un "modelo" de robot.
“Nacido” sin saber
"Nuestro robot prácticamente 'nace' sin saber nada sobre la anatomía de sus piernas o cómo funcionan", explica Ruppert. "El CPG se asemeja a una inteligencia para caminar automática incorporada que proporciona la naturaleza y que hemos transferido al robot.
"Nuestro robot prácticamente 'nace' sin saber nada sobre la anatomía de sus piernas o cómo funcionan”
La computadora produce señales que controlan los motores de las piernas, y el robot inicialmente camina y tropieza. Los datos fluyen de vuelta desde los sensores al médula espinal virtual donde se comparan los datos del sensor y del CPG. Si los datos del sensor no coinciden con los datos esperados, el algoritmo de aprendizaje cambia el comportamiento de la marcha hasta que el robot camina bien y sin tropiezos. Cambiando la salida del CPG manteniendo los reflejos activos y monitoreando el los tropiezos de los robots son una parte fundamental del proceso de aprendizaje".
Robot de bajo consumo
La computadora de “Morti" consume solo cinco vatios de energía en el proceso de caminar. Los robots cuadrúpedos industriales de fabricantes destacados, que han aprendido a funcionar con la ayuda de controladores complejos, consumen mucha más energía. Sus controladores están codificados con el conocimiento de la masa exacta y la geometría del cuerpo del robot, utilizando un modelo del robot.
Por lo general, consumen varias decenas, hasta varios cientos de vatios de potencia. Ambos tipos de robots funcionan de forma dinámica y eficiente, pero el consumo de energía computacional es mucho menor en el modelo de Stuttgart. También proporciona información importante sobre la anatomía animal.
Los robots cuadrúpedos industriales de fabricantes destacados consumen mucha más energía
"No podemos investigar fácilmente la médula espinal de un animal vivo. Pero podemos modelar uno en el robot", dice Alexander Badri-Spröwitz, coautor de la publicación con Ruppert y director del Grupo de Investigación de Locomoción Dinámica. "Sabemos que estos CPG existen en muchos animales. Sabemos que los reflejos están incrustados, pero ¿cómo podemos combinar ambos para que los animales aprendan movimientos con reflejos y CPG? Esta es una investigación fundamental en la intersección entre la robótica y la biología. El modelo robótico da respuestas a preguntas que la biología por sí sola no puede responder".
Referencia: Learning plastic matching of robot dynamics in closed-loop central pattern generators (Nature Machine Intelligence) DOI 10.1038/s42256-022-00505-4
Ya no se pueden votar ni publicar comentarios en este artículo.