
Publicado: 16/01/2019 19:00
La evolución de la locomoción a cuatro patas de los rimeros animales terrestres sigue siendo una pequeña incógnita para los científicos. Sabemos que en un pasado remoto los denominados tetrápodos se valieron de varias valiosas adaptaciones para caminar por tierra firme y que dentro, de ellos, el grupo de los amniotas tuvo un éxito más rápido y se diversificaron por todo el planeta. El ritmo en el que se produjo ese desarrollo de una locomoción avanzada es lo que sigue sin estar demasiado claro.

El equipo de John Nyakatura y Kamilo Melo acaba de hacer una contribución clave sobre esta cuestión, y lo ha hecho mediante una herramienta poco utilizada en los estudios paleontológicos: el diseño de un prototipo robótico inspirado en los fósiles de las primeras criaturas. Para comprobar de qué forma podrían moverse por el terreno, los investigadores estudiaron los fósiles de Orobates pabsti, un herbívoro de cuatro patas que vivió hace unos 290 millones de años y que además de considerarse estrechamente emparentado con los amniotas, dejó sus huellas fosilizadas en el terreno, lo que aporta valiosísima información sobre su forma de moverse.

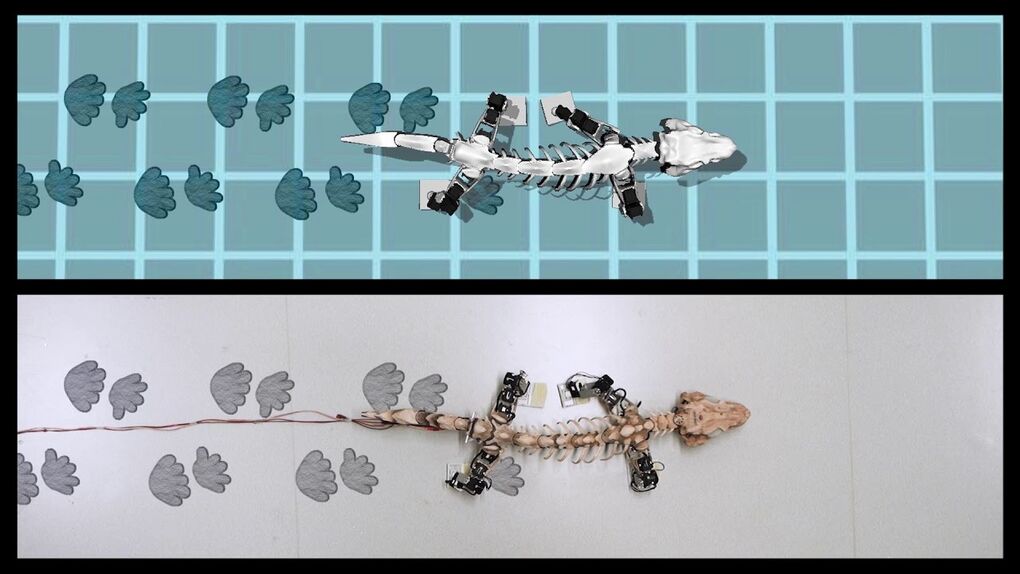
Combinando el análisis de los fósiles de Orobates y sus huellas con las medidas tomadas en cuatro especies de reptiles y anfibios vivos, los autores crearon una reconstrucción digital y un prototipo robótico, al que bautizaron como “OroBOT” y con el que estudiaron la utilidad y eficacia de distintos estilos de desplazamiento mediante el movimiento de cuerpo y patas. En un trabajo publicado este miércoles por la revista Nature, el equipo concluye que estas criaturas seguramente caminaron mejor y más erguidos de lo que se pensaba, de modo que los estilos avanzados de movimiento terrestre pudieron aparecer bastante antes de que parecieran los amniotas, como se creía hasta ahora.
Referencia: Reverse-engineering the locomotion of a stem amniote (Nature) DOI 10.1038/s41586-018-0851-2
Ya no se pueden votar ni publicar comentarios en este artículo.