Publicado: 10/09/2015 10:58
En los últimos tiempos se ha convertido en noticia habitual que una persona con una determinada discapacidad sea capaz de superarla mediante una prótesis que maneja con el cerebro. El dispositivo detrás de este salto tecnológico se llama interfaz cerebro-computador (BMI) y es el que permite al usuario enviar órdenes a la máquina y que ésta las descodifique en forma de movimientos. En la última edición de Scientific Reports, de Nature, un equipo de investigadores españoles de la Universidad de Zaragoza y la Escuela Politécnica de Lausana (EPFL) presenta un nuevo paradigma que podría cambiar este tipo de estrategia y contribuir al desarrollo de las primeras neuroprótesis capaces de aprender por sí mismas.
“Una vez que lo ha detectado, aprende enseguida”.
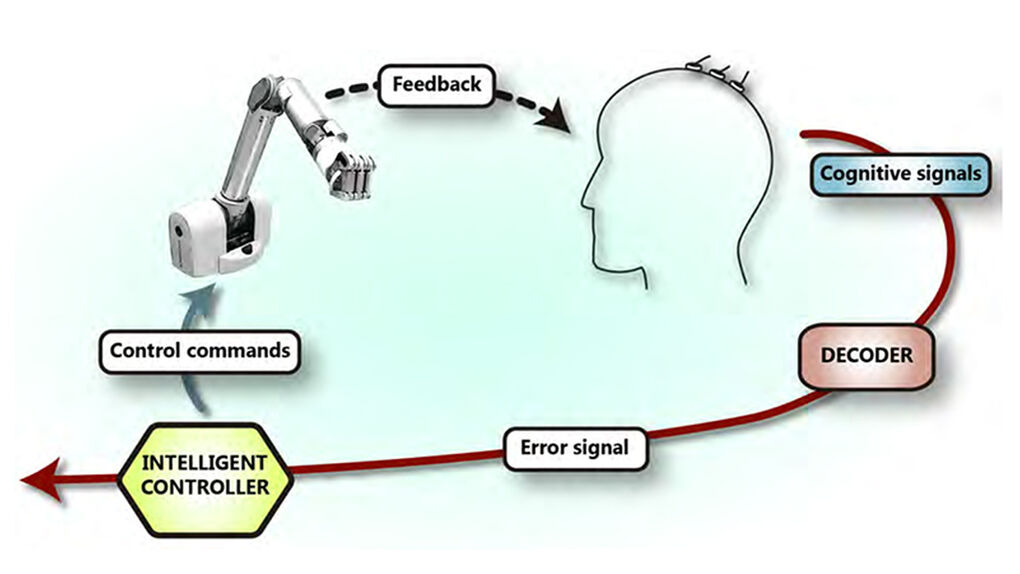
La idea del sistema es relativamente sencilla. En lugar de limitarse a registrar la señal del sujeto y traducirla a movimientos, los nuevos interfaces incluyen un controlador inteligente que detecta en el cerebro una señal llamada “potencial de error” y permite a la máquina aprender por sí misma. Esto facilita que el usuario comience a trabajar con el dispositivo en pocos minutos y que sea éste el que vaya detectando los movimientos correctos sin necesidad del duro entrenamiento que hace falta ahora. “Esta nueva estrategia coloca la carga del aprendizaje en la máquina y no en el sujeto”, explica a Next Javier Mínguez, coautor del estudio. “Podría permitir una nueva forma de controlar prótesis más inteligentes y que se adapten a las personas”.
La clave de esta tecnología diseñada durante los últimos seis años por Mínguez y Luis Montesano, en colaboración con el equipo del profesor José del Millán de la EPFL, está en una señal eléctrica que se detecta en el cerebro cuando estamos aprendiendo una tarea. La denominada N400 (llamada así porque aparece a los 400 milisegundos) indica que lo que queríamos hacer no está saliendo bien. Mediante la detección de esta señal, el equipo de Mínguez ha encontrado la manera de que el interfaz vaya ajustando los parámetros de movimiento sin necesidad de que el sujeto entrene. “El potencial de error se produce cuando tu cerebro ve que hay una contradicción”, asegura el investigador. “Cuando se produce esta señal, el sistema lo decodifica y va aprendiendo el comportamiento”.
Pongamos que un sujeto que ha perdido un brazo y comienza a utilizar un dispositivo robótico mediante un interfaz tradicional para poder coger un vaso. Cada uno de estos movimientos requiere que el sujeto ensaye y que la máquina termine por reconocer cada una de esas órdenes. Con la nueva estrategia, el sujeto comienza a utilizar el dispositivo y es la máquina la que detecta los potenciales de error (la señal en su cerebro de que no está haciendo lo que él quiere), de modo que es ella la que aprende y la que se adapta al cerebro. La máquina sabe que está cumpliendo sus objetivos cuando esta actividad no aparece.
El sistema se basa en detectar los potenciales de error.
Los científicos han probado el sistema con éxito en tres prototipos y esperan ahora que los desarrolladores de prótesis empiecen a aplicar el nuevo paradigma para mejorar sus resultados o encontrar posibles problemas. En las pruebas, los doce sujetos que realizaron el experimento fueron capaces de entrenar el sistema en unos 25 minutos y con unos 300 movimientos, al cabo de los cuales el interfaz era capaz de diferenciar las acciones erróneas y correctas de la prótesis con una precisión del 80%. Otra de las ventajas del sistema es que evoluciona con el paciente, de modo que no necesita reajustes y las acciones aprendidas se almacenan en un repertorio que el usuario no necesita recordar ni entrenar. Esta habilidad puede ser particularmente útil para gente con enfermedades neurodegenerativas, aseguran los autores, ya que les ayudaría a soportar y adaptarse a la pérdida de capacidad motora.

“Una vez que lo has detectado es muy rápido y aprendes enseguida”, indica Mínguez. “Desde muy pronto la máquina ya está operativa, mientras que con el sistema actual la persona se pasa mucho tiempo, a veces días o semanas – entrenando un movimiento”. En los últimos años, los especialistas que trabajan en este campo han observado que cada vez cuesta más realizar grandes avances, precisamente porque requieren que el usuario haga más esfuerzos. “Escalar ese tipo de estrategias se está haciendo más difícil”, concluye Mínguez. “Este paradigma pone el peso en la máquina y en principio abre la puerta a que escale a tareas más complejas. Pero eso lo verá toda la gente que empiece a construir nuevas prótesis”.
Referencia: Teaching brain-machine interfaces as an alternative paradigm to neuroprosthetics control (Scientific Reports)
Ya no se pueden votar ni publicar comentarios en este artículo.