
Publicado: 23/05/2017 18:06
Flores carnívoras robóticas que atrapan insectos artificiales. No es una escena del remake de “Blade runner”, sino el experimento que ha realizado el equipo de Arri Priimagi y que describe este martes en la revista Nature Communications. El trabajo presenta un dispositivo robótico blando que imita la forma de actuar de la conocida venus atrapamoscas (Dionaea muscipula) y es capaz de atrapar objetos que pasan por sus cercanías al detectar el cambio de luz.
https://youtube.com/watch?v=rYxrVZysCG8%3Fshowinfo%3D0
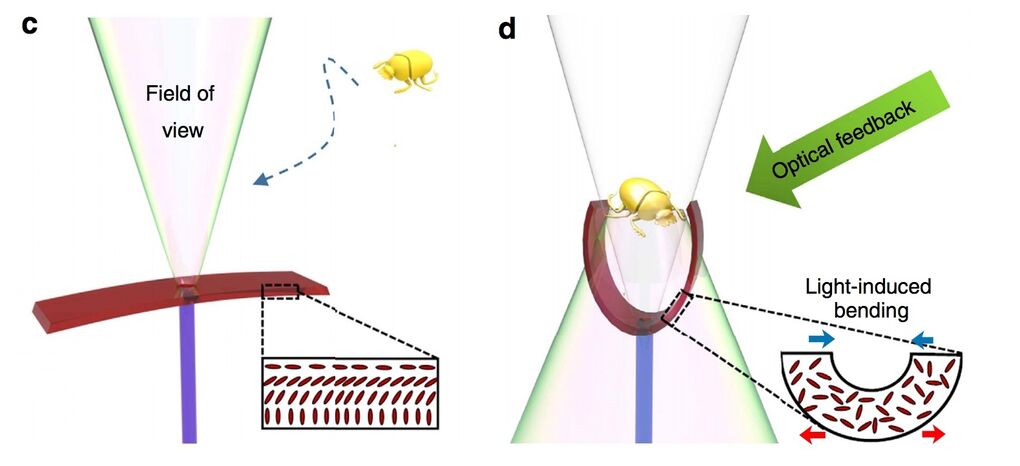
Los autores han utilizado materiales que cambian de forma al recibir un estímulo luminoso, el concreto un elastómero de cristal líquido con una fibra óptica que permite prescindir de una estimulación externa y le da autonomía. La fibra óptica actúa iluminando el objetivo y es la luz reflejada sobre este la que hace que el elastómero se ponga en marcha y se doble. Cuando se mueve, el material es capaz de capturar objetos de pequeño tamaño con diferentes formas, incluidos “insectos artificiales” (pequeñas partículas que reflejan la luz) cuando entran en su campo de “visión”.
https://youtube.com/watch?v=fjLkv99p6-M%3Fshowinfo%3D0
Según sus autores, el dispositivo es capaz de atrapar objetos con una masa cientos de veces superior al propio robot. Una vez que la luz se apaga, el objeto es liberado. La intención es abrir el camino a la fabricación de micro-robots “blandos” capaces de reconocer objetos y reaccionar para realizar pequeñas tareas. hasta ahora, automatizar estos dispositivos era todo un reto debido a la ligereza y fragilidad de los materiales.
Referencia: A light-driven artificial flytrap (Nature Communications) DOI 10.1038/ncomms15546
Ya no se pueden votar ni publicar comentarios en este artículo.