Publicado: 17/04/2018 11:45
Los microrrobots forman una nueva generación de dispositivos electromecánicos, de un tamaño tan pequeño como el de una moneda o incluso menor, pero con una enorme gama de aplicaciones potenciales en los campos más variados.
Algunos son capaces de arrastrar 2.000 veces su propio peso, otros pueden volar y bucear, y los hay que se desplazan imitando a los gusanos. También hay pequeños autómatas colaborativos que funcionan en enjambre como un millar de insectos.
Uno de los centros sobresalientes de referencia mundial en la investigación y desarrollo de esta tecnología, es la Universidad de Harvard, en Cambridge (Massachusetts, Estados Unidos).
La Facultad de Ingeniería y Ciencias Aplicadas John A. Paulson, SEAS y el Instituto Wyss de Ingeniería Inspirada en la Biologia de Harvard, han diseñado distintos modelos de autómatas en miniatura.
Kilobots: estrella de mar robótica
Investigadores de la SEAS y del Wyss han logrado que 1.024 pequeños robots autónomos se organicen y formen un enjambre capaz de moverse de forma coordinada y adoptar formas complejas, como la de una estrella de mar de cinco puntas, siendo comandados por medio de señales infrarrojas.
Los centros de ingeniería SEAS y Wyss de la Universidad de Harvard (EEUU) han diseñado autómatas inspirados en las abejas, las cucarachas y el origami.
Cada uno de estos robots colaborativos, extremadamente simples y denominados Kilobots, mide unos pocos centímetros de diámetro, se asienta y mueve sobre tres patas en forma de alfiler y utiliza micromotores que vibran para desplazarse.

Este enjambre, creado en el laboratorio de la científica de la computación, Radhika Nagpal, es un hito significativo en el desarrollo de la inteligencia artificial colectiva, según sus desarrolladores.
Millidelta: Milimétricoy basado en el origami
Los centros de ingeniería Wyss y SEAS de Harvard también han desarrollado un robot miniaturizado inspirado en el origami (papiroflexia japonesa) que puede funcionar a alta velocidad, ejercer mucha fuerza y operar con precisión a escala micrométrica (de millonésimas de metro).
El robot milliDelta mide tan solo 15 por 15 por 20 milímetros, es compatible con una amplia gama de tareas de micromanipulación y el microensamblaje en la fabricación y también en la medicina, por ejemplo en la microcirugía de retina, que se efectúa en el ojo humano, según sus desarrolladores, el equipo del profesor Robert J. Wood.
Hamr: Cucaracha mecánica y versátil
Investigadores de SEAS, liderados por el profesor Wood, han desarrollado además un robot inspirado en las cucarachas que es rápido y resistente como esas criaturas.

El MicroRobot Ambulatorio de Harvard (HAMR) puede correr a altas velocidades, saltar, subir, girar bruscamente, transportar cargas útiles y caer desde grandes distancias sin resultar dañado.
Según sus creadores este tipo de máquinas, con algunas capacidades que rivalizan con las de sus contrapartes biológicas, serán valiosas para los estudios biológicos y tareas de búsqueda y rescate e inspección de infraestructuras.
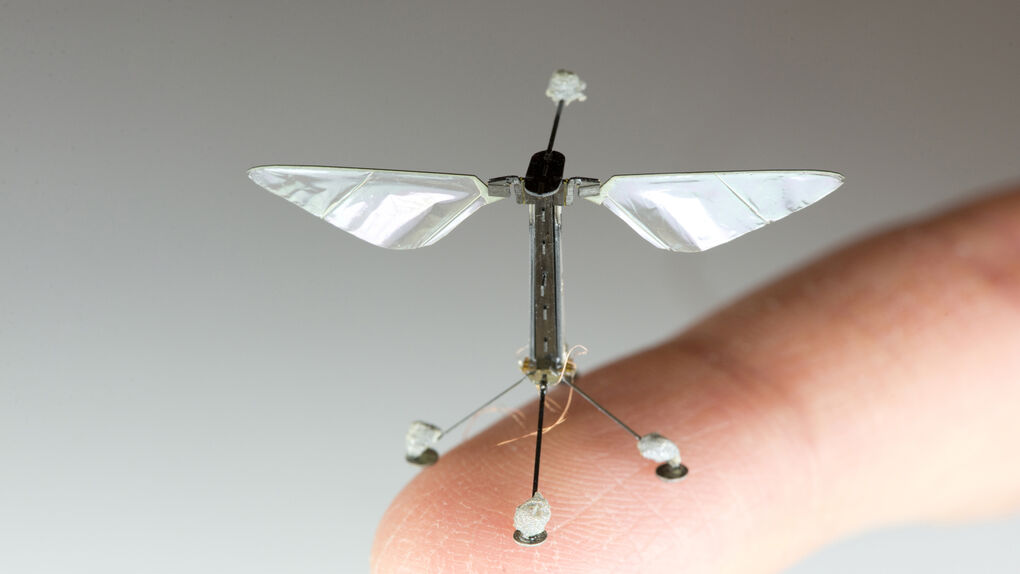
Robobee: el híbrido que vuela y nada
Los expertos del Instituto Wyss y de la Facultad SEAS desarrollan también unos microrrobots voladores autónomos inspirados en la biología de la abeja, con usos potenciales en la polinización de cultivos, misiones de búsqueda y rescate en casos de desastre y vigilancia, así como en la monitorización meteorológica, climática y ambiental en alta resolución.

Los denominados RoboBees, miden aproximadamente la mitad del tamaño de un 'clip' sujetapapeles, pesan menos de la décima parte de un gramo y vuelan y levitan utilizando "músculos artificiales", compuestos por materiales que se contraen cuando se les aplica un voltaje, según sus desarrolladores.
Algunos RoboBees han sido sometidos a modificaciones adicionales que además de volar, les permiten desplazarse bajo el agua, moviendo sus alas, así como posarse adhiriéndose en paredes y todo tipo de superficies, desde cristal hasta madera o una hoja vegetal, utilizando electricidad estática.

Una de las versiones más recientes de estos microrrobots, es un híbrido multiuso capaz de volar, zambullirse en el agua, nadar, propulsarse de nuevo fuera del líquido y aterrizar con seguridad.
"Este microrrobot puede pasar directamente del agua al aire, algo que está más allá de lo que la naturaleza puede lograr en el mundo de los insectos", según el investigador Yufeng Chen, uno de los principales participantes en este proyecto.
Colias: micromáquinas que forman multitudes
Las universidades Stanford (California, EEUU), Lincoln (Lincoln, Reino Unido) y Tsinghua (Pekín, China) también trabajan en distintas tecnologías de miniaturización robótica.

Científicos de Lincoln y de Tsinghua han desarrollado microrrobots autónomos que, agrupados en gran número, pueden reproducir el comportamiento de los enjambres de abejas y otras aglomeraciones de seres como los insectos, las aves y los peces.
Los microrrobots Colias miden 4 centímetros de diámetro y se mueven a 35 centímetros por segundo, lo que permite utilizarlos en enjambres que se desplazan con rapidez sobre grandes áreas.

Los movimientos en enjambre se efectúan mediante simulaciones informáticas, en vez de con máquinas físicas, según sus desarrolladores, Farshad Arvin y Shigang Yue, de la Escuela de Ciencias de la Computación de Lincoln (SOCS).
Microtugs: Autómatas forzudos
Por su parte, investigadores del Laboratorio de Biomimética y Destreza en Manipulación (BDML) de Stanford han desarrollado, dentro del proyecto MicroTugs, un robot ultrapequeño que pesa 12 gramos y puede arrastrar 2.000 mil veces su propio peso sobre el suelo.
Los robots ultrapequeños MicroTugs pesan 12 gramos, pero pueden arrastrar 2.000 mil veces su propio peso
“Este microrrobot utiliza un adhesivo como el que utilizan las hormigas para mover cargas y ejerce una fuerza equivalente a la de una persona adulta arrastrando a una ballena azul por la tierra”, según sus creadores, David Christensen y Elliot Hawkes.

“Hasta ahora los microrrobots han ido mejorado progresivamente su capacidad de movimiento y detección, pero carecían de la capacidad de cambiar el mundo mediante el traslado de cargas como los MicroTugs que hemos desarrollado”, según los investigadores del BDML.
Se mueven como gusanos
")
Por su parte un equipo de investigadores españoles de la Escuela Técnica Superior de Ingenieros Industriales de la Universidad Politécnica de Madrid (UPM), liderado por Ernesto Gambao, ha desarrollado unos microrrobots de estructura tubular formados por módulos, con un tamaño que no supera los 25 milímetros y 10 gramos de peso, que imitan los comportamientos de seres vivos.
Investigadores de la UPM han desarrollado robots con un tamaño que no supera los 25 milímetros y 10 gramos de peso, que avanzan y cambiar de dirección moviéndose como un gusano
Los módulos tienen en común un sistema propio de control y comunicaciones que les permite reconocerse a la hora de ensamblarse, trabajar en objetivos comunes, y avanzar y cambiar de dirección moviéndose como un gusano, extendiéndose, contrayéndose y girando, para desplazarse dentro de una tubería o a través de pequeñas cavidades, según la UPM.
Ya no se pueden votar ni publicar comentarios en este artículo.